国际首台
小机器人背负核能安全“大责任”
国际首台
小机器人背负核能安全“大责任”




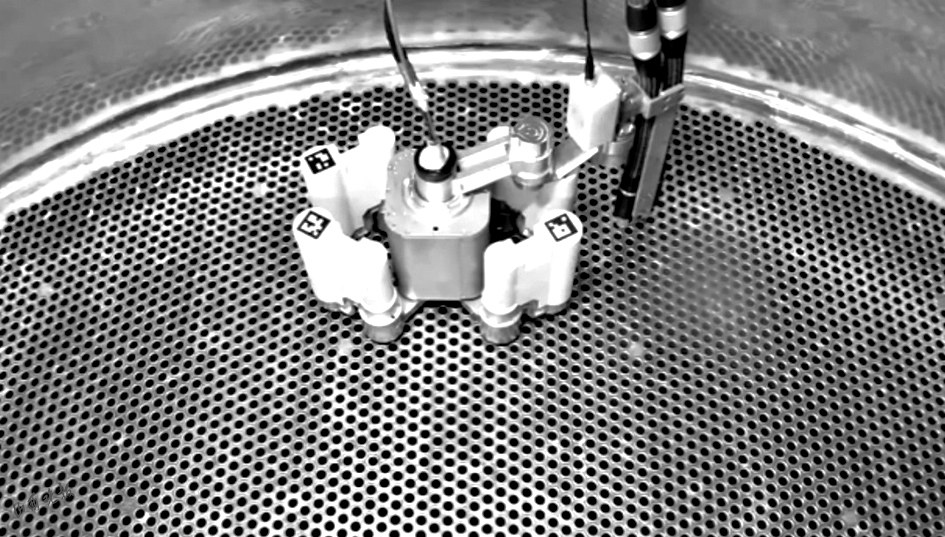
近日,在苍南核电站华龙一号机组内,一个身形小巧的四足机器人,紧紧“趴”在蒸发器传热管上,将“触角”样的探头精准伸进管内,逐根检测着传热管的健康状态。
机器人正在进行检测工作,这是哈尔滨工程大学与中广核检测技术有限公司合作研制的国际首台四足传热管检测机器人,它采用独特的四足锚爪结构,具备变姿态快速爬行能力,有效提高传热管检测效率。
小机器人背负核能安全“大责任”核电站蒸发器传热管是核能安全的“主动脉”,传热管疲劳、缺陷、腐蚀如果未能及时发现,便有可能破裂造成核泄漏事故。
“每个蒸发器内有数千根传热管,每根传热管的外径只有十几毫米,管壁非常薄。以往,传热管检测机器人走一步只能覆盖近20个管孔,检测一根传热管需要行驶约20米,检测完所有传热管需要10多天,耗时长、成本高。”哈尔滨工程大学船舶工程学院教授王刚介绍。
机器人工作环境图示“壁虎”外形能在核电机组内“如履平地”针对传统传热管检测机器人难以适配多种蒸发器型号、检测时间长、易发生漏检等问题,团队研发出该型四足传热管检测机器人,采用四足构型,运用高效运动规划、视觉定位等技术,为核电设备智能运维提供了新型解决方案。机器人行走机构示意图“这款机器人最大的优势在于其灵活性和环境适应性。”王刚说,“自动锁定的锚爪能够确保机器人在断电断气等意外情况下保持可靠的抓取状态,壁虎一样的四足并联行走机制能够灵活‘爬行’在各种规格的管板上,双探头检测臂具有360°旋转能力和平面内冗余自由度,确保机器人在一次定位中实现最大检测工作空间。”机器人正在进行功能测试在苍南核电站的现场检测中,四足传热管检测机器人携带涡流检测工具,仅用0.02秒便实现在检测场景中的全局定位,边走边检,大幅缩减了检测过程中的移动时间。
目前,该成果已在中广核集团核电机组成功应用,可覆盖华龙一号等多种堆型,相比传统传热管检测机器人检测效率提升200%,实现了传热管检测的全覆盖,大幅降低了反应堆大修工期和维护成本。
据光明日报
山西日报、山西晚报、山西农民报、山西经济日报、山西法制报、山西市场导报所有自采新闻(含图片)独家授权山西新闻网发布,未经允许不得转载或镜像;授权转载务必注明来源,例:"山西新闻网-山西日报 "。
凡本网未注明"来源:山西新闻网(或山西新闻网——XXX报)"的作品,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。